











Produktkonsultation
Din e-postadress kommer inte att publiceras. Obligatoriska fält är markerade *


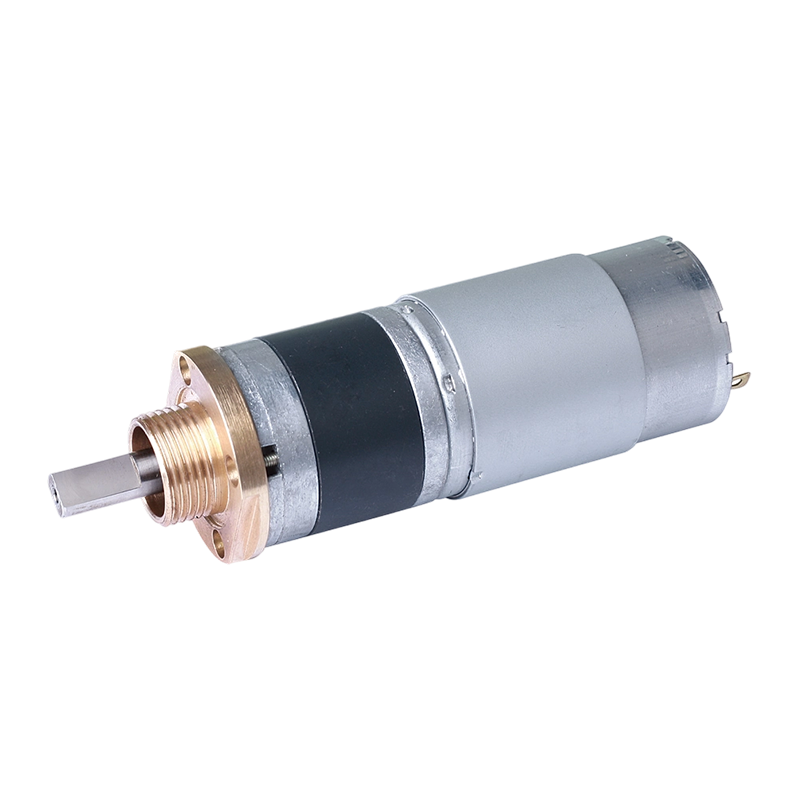
En DC-växelmotor är en elektrisk likströmsmotor parad med en mekanisk växellåda i en enda integrerad enhet. Motorn själv snurrar snabbt - ofta 3 000 till 15 000 rpm vid märkspänning - men de flesta verkliga tillämpningar kräver långsam, kontrollerad rörelse med betydande vridkraft. Växellådan löser detta genom att byta hastighet mot vridmoment genom en serie ingripande växlar. Resultatet är en utgående axel som roterar mycket långsammare än motorns rotor, men med ett proportionellt högre vridmoment tillgängligt vid axeln.
Utan växellådan kan en liten likströmsmotor snurra ett fläktblad lätt men kämpar för att lyfta en last, driva ett transportband eller vrida en ventil. Med en växelreduktion på, säg, 100:1, levererar samma motor som producerar 5 mN·m frigående vridmoment nu ungefär 500 mN·m vid utgången – minus förluster från växeln i friktion, vanligtvis 5–20 % beroende på växeltyp och smörjning. Denna multiplikation av vridmoment, i kombination med den kompakta integrationen av motor och växellåda i en enhet, är anledningen till att DC-växelmotorer är bland de mest specificerade rörelsekomponenterna i industriella, kommersiella och konsumenttillämpningar.
Växellådans design har en större inverkan på prestanda, storlek, effektivitet och buller än nästan någon annan designvariabel. Fyra konfigurationer dominerar marknaden.
Kugghjul har raka kuggar skurna parallellt med axelns axel. De är den enklaste och billigaste växeltypen att tillverka, vilket gör cylindriska DC-motorer till standardvalet för kostnadskänsliga applikationer. Deras främsta svaghet är buller: eftersom hela tandbredden griper in samtidigt vid varje nätkontakt, producerar cylindriska kugghjul ett karakteristiskt klapprande vid hög hastighet. Effektiviteten är god – vanligtvis 95–98 % per steg – och de klarar måttliga radiella belastningar bra. Kugghjulsmotorer är vanliga i skrivare, leksaker, varuautomater och lätta ställdon där tyst drift inte är en prioritet.
En planetväxellåda arrangerar flera "planet"-växlar runt en central "sol"-växel, alla inkluderade i ett ringdrev. Eftersom belastningen delas över flera planetväxlar samtidigt, levererar en planetarisk DC-växelmotor mycket hög vridmomentdensitet i ett kompakt, koaxiellt paket. Den utgående axeln är i linje med motoraxeln, vilket förenklar installationen i layouter med begränsat utrymme. Planetväxellådor är styvare och mer exakta än snäckor eller snäcktyper, vilket gör dem till det föredragna valet för robotik, automatiserade styrda fordon (AGV), elektriska skruvdragare och alla applikationer som kräver högt vridmoment, snäv positionsnoggrannhet och lång livslängd. Avvägningen är kostnad: planetväxellådor är betydligt dyrare att tillverka än cylindriska eller spiralformade typer med samma vridmoment.
En snäckväxellåda använder en skruvliknande snäckaxel som griper in i ett snäckhjul i en 90-graders vinkel. Denna konfiguration uppnår mycket höga reduktionsförhållanden i ett enda steg - vanligtvis 5:1 till 100:1 - och ger en naturlig självlåsande egenskap: när motorn stannar kan belastningen inte backa växellådan. Detta gör DC-motorer för snäckväxeln idealiska för applikationer där lasten måste hålla position utan ström, såsom garageportöppnare, scenhissar, ställdon för sjukhussängar och säkerhetsbarriärer. Den huvudsakliga begränsningen är effektiviteten: snäckväxelns nätfriktion är hög, med typisk enstegseffektivitet som sträcker sig från 50–90 % beroende på ledningsvinkeln, med högre utväxlingar som blir allt mindre effektiva. Snäckväxelmotorer producerar också betydande värme under kontinuerliga högbelastningscykler.
Spiralformade kugghjul har tänder skurna i vinkel mot axelns axel, så kontakten mellan tänderna är gradvis och progressiv snarare än abrupt. Detta minskar buller och vibrationer dramatiskt jämfört med cylindriska växlar och förbättrar belastningskapaciteten något på grund av den större effektiva kontaktytan. Spiralformade DC-växelmotorer är vanliga i applikationer som kräver tystare drift - transportörer, förpackningsmaskiner och medicinsk utrustning. Kombinationer med spiralfasning gör att den utgående axeln kan förskjutas 90 grader i förhållande till motorn, liknande en snäckdrift men med högre effektivitet (vanligtvis 94–97 % per steg). Den ökade axiella dragkraften som genereras av spiralformade kugghjulsnät kräver lager som kan hantera denna belastning, vilket ökar enhetskostnaden något.
Själva DC-motorelementet finns i två grundläggande arkitekturer, och valet mellan dem påverkar kostnaden, underhållskraven, hastighetsområdet och livslängden avsevärt.
| Funktion | Borstad DC-växelmotor | Borstlös DC-växelmotor (BLDC) |
| Kommuteringsmetod | Mekanisk (kolborstar kommutator) | Elektronisk (ESC eller motorförare) |
| Typisk livslängd | 500–3 000 timmar (begränsat användning av borstar) | 10 000–20 000 timmar |
| Kontrollkomplexitet | Enkel — spänning eller PWM direkt | Kräver en dedikerad BLDC-drivrutin/ESC |
| Effektivitet | 75–85 % typiskt | 85–95 % typiskt |
| Buller & EMI | Högre (borstbågsbildning genererar EMI) | Lägre |
| Enhetskostnad | Lägre | Högre (motorförare) |
| Typiska applikationer | Leksaker, vitvaror, ljusautomation | Robotik, AGV, medicinsk utrustning, elbilar |
För prototypframställning eller periodiska tillämpningar med låg belastning är en borstad DC-växelmotor som drivs av en enkel L298N eller TB6612FNG H-brygga den snabbaste och billigaste vägen till ett fungerande system. För allt som körs kontinuerligt, arbetar i en tuff miljö eller måste hålla i flera år på fältet utan underhåll, ger en borstlös DC-växelmotor – trots sin högre kostnad i förväg och extra förarelektronik – nästan alltid bättre totala ägandekostnader.
Datablad för DC-växelmotorer kan vara täta, men fem parametrar avgör om en motor kommer att fungera i din applikation. Att förstå var och en förhindrar de vanligaste valmisstagen.
DC-växelmotorer är designade för en specifik matningsspänning — oftast 6V, 12V, 24V eller 48V i industri- och hobbyapplikationer. Att driva en motor avsevärt över dess märkspänning accelererar slitaget av borstar i borstade typer, överhettar lindningar och förkortar lagrets livslängd. Drift under märkspänning minskar tillgängligt vridmoment och kan få motorn att stanna under belastning. För batteridrivna system, matcha motorns märkspänning med den nominella batterispänningen vid mitten av laddningen, inte vid full laddning, för att undvika överspänning i toppen av laddningscykeln. En 12V DC-växelmotor som drivs från en nyladdad 3S LiPo (12,6V) är marginellt acceptabel; att köra den från ett 4S-paket (16,8V) kommer att förstöra den snabbt.
Tomgångsvarvtalet är den utgående axelns RPM när motorn körs med märkspänning med noll applicerat vridmoment. Under faktisk belastning sjunker varvtalet - vanligtvis med 10–20 % vid nominellt (kontinuerligt) vridmoment och med upp till 50 % vid toppstoppvridmoment. När du beräknar om en DC-växelmotor kan förflytta en last med önskat varvtal, använd alltid det belastade varvtalet vid ditt förväntade vridmoment, inte tomgångssiffran. Tillverkare listar ibland bara tomgångsvarvtal och vridmoment för stopp; den belastade arbetspunkten faller ungefär i mitten av hastighet-vridmomentkurvan.
Nominellt vridmoment (även kallat kontinuerligt vridmoment) är det maximala vridmoment motorn kan leverera på obestämd tid utan överhettning. Stallvridmoment är det maximala vridmomentet som produceras när axeln hålls stationär - vanligtvis 5–10 gånger det nominella vridmomentet för en borstad DC-växelmotor. Stoppmoment är användbart för att dimensionera intermittenta toppbelastningar (kraften som krävs för att bryta en fast ventil fri, till exempel), men kontinuerlig drift vid eller nära stopp kommer att överhetta motorn snabbt. Välj en motor vars nominella vridmoment är minst 20–30 % över din applikations förväntade kontinuerliga belastningsmoment. Denna säkerhetsmarginal står för friktionsvariationer, spänningsnedsättning och temperaturnedsättning.
Utväxlingsförhållandet uttrycker hur många motoraxelvarv som ger ett utgående axelvarv. Ett förhållande på 50:1 innebär att utgången vrids en gång för varje 50:e motorvarv. Högre utväxling ger lägre utgående hastighet och högre utgående vridmoment. Men mycket höga utväxlingar introducerar fler växelsteg, vilket ökar friktionsförlusterna och glappet - det lilla fria spelet i den utgående axeln när riktningen ändras. För positioneringsapplikationer är glapp en kritisk specifikation: planetväxellådor erbjuder vanligtvis 0,5–3 bågminuters glapp i precisionsgrader, medan ekonomihjulsväxellådor kan ha 1–5 graders glapp, vilket är oacceptabelt för allt som kräver repeterbar positionering.
Duty cycle beskriver hur många procent av tiden en motor fungerar kontra vilor inom en given cykelperiod. En motor som är klassad för S1 (kontinuerlig drift) kan köras på obestämd tid med märklast utan överhettning. Märkningarna S2 (korttidsdrift) och S3 (intermittent periodisk drift) tillåter högre toppeffektnivåer eftersom motorn kyls under avstängda perioder. Matcha alltid motorns driftvärde med din faktiska driftscykel - en motor som är klassad för 30 % driftcykel kommer att överhettas och misslyckas om den körs kontinuerligt, även om vridmomentet och hastigheten ligger inom märkskyltens gränser.
Spänningsvalet styrs ofta av den tillgängliga strömkällan snarare än av motorpreferenser, men att förstå de typiska användningsfallen för varje spänningsnivå hjälper till att begränsa dina alternativ snabbt.
Genom att göra rätt motorval första gången undviker du kostsamma omkonstruktioner och fel på fältet. Följ detta praktiska ramverk:
Beräkna det vridmoment som din applikation kräver vid den utgående axeln. För en hjulförsedd robot innebär detta att man beräknar kraften som behövs för att accelerera robotens massa, övervinna rullande friktion och klättra alla lutningar som förväntas under drift. För ett linjärt ställdon, beräkna kraften på ledarskruven och omvandla den till motormoment via skruvens ledning och verkningsgrad. Lägg till en säkerhetsmarginal på 25–50 % för att ta hänsyn till friktionsvariationer, åldrande och värsta belastningsscenarier. Detta målmomentnummer – med marginalen tillämpad – blir din specifikation för lägsta nominella vridmoment.
Fastställ den lägsta och maximala utgående axelhastigheten som din applikation behöver. En transportör som förflyttar produkten med 0,5 m/s med en drivrulle med 50 mm diameter kräver en utmatningshastighet på cirka 191 RPM (0,5 / (π × 0,05) × 60). Välj en motor vars tomgångsvarvtal är minst 15–20 % över det erforderliga belastade varvtalet för att säkerställa att motorn inte arbetar nära stopp under normala förhållanden.
Använd följande beslutsguide för att matcha växellådans typ till applikationskraven:
Kontrollera att din strömförsörjning kan leverera toppströmbehovet för motorn vid stopp. Stoppströmmen för en borstad DC-växelmotor är vanligtvis 5–10 gånger tomgångsströmmen. Om din strömförsörjning inte kan överföra denna ström tillfälligt under uppstart eller störningsförhållanden, lägg till en strömbegränsande motordrivenhet med justerbar strömgräns, eller välj en motordrivenhet med tillräckligt utrymme. För borstlösa DC-växelmotorer, bekräfta att BLDC-drivenhetens kontinuerliga och toppströmvärden överstiger motorns krav med minst 20 % marginal.
Standard DC-växelmotorer är inte tätade. Om motorn kommer att utsättas för damm, fukt, kylvätskestänk eller spolningsförhållanden, specificera en IP-klassad enhet – IP54 för damm- och stänkskydd, IP65 eller IP67 för mer krävande miljöer. För livsmedelsbearbetning, läkemedel eller marina tillämpningar, bekräfta att växellådssmörjmedlet uppfyller tillämpliga myndighetskrav (NSF H1 livsmedelsklassat fett för livsmedelskontaktzoner, till exempel). Drifttemperaturområdet är också viktigt: standardmotorer är klassade för 0–40°C omgivningstemperatur; för kyllager eller utomhusinstallationer i nordliga klimat, bekräfta lågtemperaturfettspecifikationer och lindningstemperaturklassificeringar.
DC-växelmotorer förekommer i ett enormt utbud av produkter och system. Att förstå var de används ofta hjälper till att identifiera lämpliga referensdesigner och validerade konfigurationer.
| Industri | Ansökan | Typisk växelmotortyp |
| Robotik & AGV | Drivhjul, ledmanövrering, gripmekanismer | Borstlös planetarisk, 24V–48V |
| Industriell automation | Transportörer, indexeringsbord, ventilställdon | Helix, mask eller planetarisk, 24V |
| Medicinsk utrustning | Infusionspumpar, kirurgiska verktyg, sjukhussängar | Borstlös planetarisk, låg glapp, 12V–24V |
| Automotive | Elektriska fönsterhissar, sätesjusteringar, soltaksdrifter | Borstad mask eller sporre, 12V |
| Konsumentelektronik | Kamera panorering/lutning, ställdon för smarta hem, skrivare | Borstad sporre, 5V–12V |
| Jordbruk | Bevattningsventilkontroll, såmekanismer | IP-klassad mask eller planetarisk, 12V–24V |
| Byggnadsautomation | VVS-spjäll, persiennställdon, dörrdrifter | Borstlös spiral eller mask, 24V |
DC-växelmotorer är väl lämpade för drift med variabel hastighet eftersom DC-motorns hastighet är direkt proportionell mot pålagd spänning. I praktiken styrs hastigheten med en av tre metoder.
PWM är standardmetoden för att styra borstade DC-växelmotorer från mikrokontroller, PLC:er och motordrivrutiner IC:er. Föraren slår på och av motorförsörjningen med en fast frekvens – vanligtvis 1–20 kHz – och arbetscykeln (den procentuella andelen tid som matningen är på) bestämmer medelspänningen och därmed hastigheten. En 50 % arbetscykel vid 12V ger ungefär 6V motsvarande motorn. PWM-styrning är effektiv eftersom omkopplingstransistorerna tillbringar större delen av sin tid helt på eller helt av, vilket minimerar resistiva förluster. PWM-frekvenser under 1 kHz kan orsaka hörbart motorgnäll när ankarlindningarna vibrerar vid omkopplingsfrekvensen; frekvenser över 20 kHz trycker detta över det hörbara området. För borstade DC-växelmotorer är en PWM-frekvens på 10–20 kHz ett vanligt praktiskt val.
För applikationer som kräver exakt, konsekvent hastighet oavsett belastningsvariation – robotplattformar, bandenheter, precisionsdispensering – ger en roterande encoder monterad på motoraxeln eller växellådans utgång i realtid hastighetsåterkoppling till en PID-regulator. Regulatorn jämför den faktiska hastigheten med börvärdet och justerar PWM-driftcykeln för att kompensera. Kodare för DC-växelmotorer är typiskt kvadraturoptiska eller magnetiska halleffekttyper, med upplösningar från 6 till flera tusen räkningar per varv beroende på precisionskrav. Många leverantörer av DC-växelmotorer erbjuder integrerade kodaralternativ som standardartiklar i katalogen, vilket förenklar hårdvaruintegrationen avsevärt.
I enkla system där belastningen är relativt konstant och hastighetsprecisionen inte är kritisk, kan hastigheten ställas in genom att justera matningsspänningen med en variabel likströmskälla eller en linjär spänningsregulator. Detta tillvägagångssätt är det minst effektiva - en linjär regulator avleder spänningsfallet som värme - och erbjuder ingen belastningskompensation, men det är den enklaste implementeringen och är lämplig för testbänkar, manuella hastighetsjusteringar och applikationer med mycket låg effekt där termisk avledning i regulatorn inte är ett problem.
Att förstå vad som till slut får en likströmsväxelmotor att misslyckas hjälper dig att designa system som förlänger serviceintervallen och fångar upp problem innan de orsakar oplanerade stillestånd.
Din e-postadress kommer inte att publiceras. Obligatoriska fält är markerade *
Upphovsrätt © Zhejiang Dongzheng Motor Co.,Ltd. Alla rättigheter reserverade.
 DC-växelmotortillverkare
DC-växelmotortillverkare